目录
现代控制理论
第一章
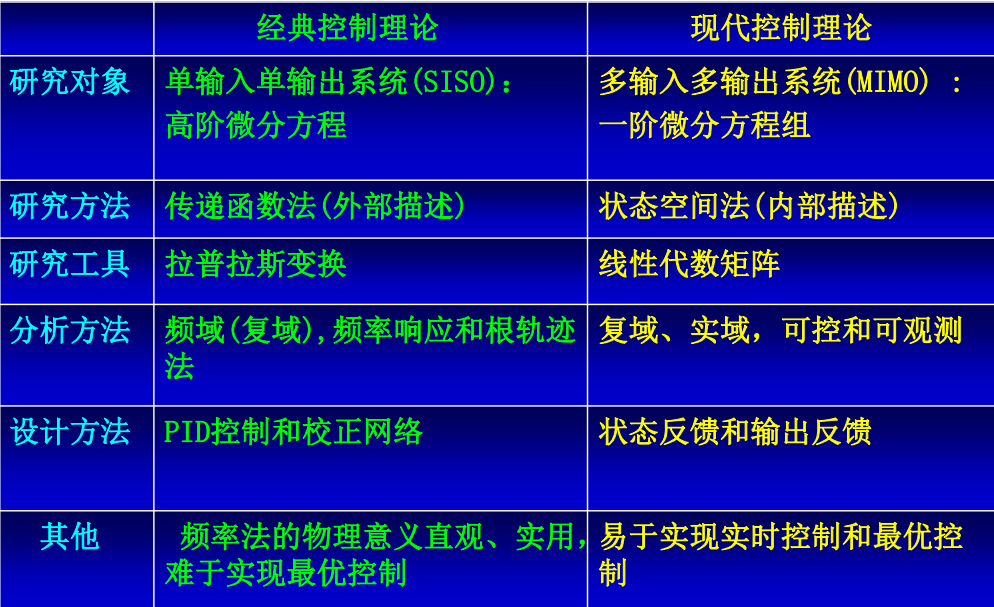
现代控制理论和经典控制理论的区别
-
经典控制理论主要研究单输入单输出线性时不变系统,现代控制理论可以解决多输入多输出系统、非线性系统和时变系统等控制问题。
-
相比经典控制理论, 现代控制理论考虑问题更全面、更复杂, 主要表现在考虑系统内部之间的耦合,系统外部的干扰, 但符合从简单到复杂的规律。
第二章
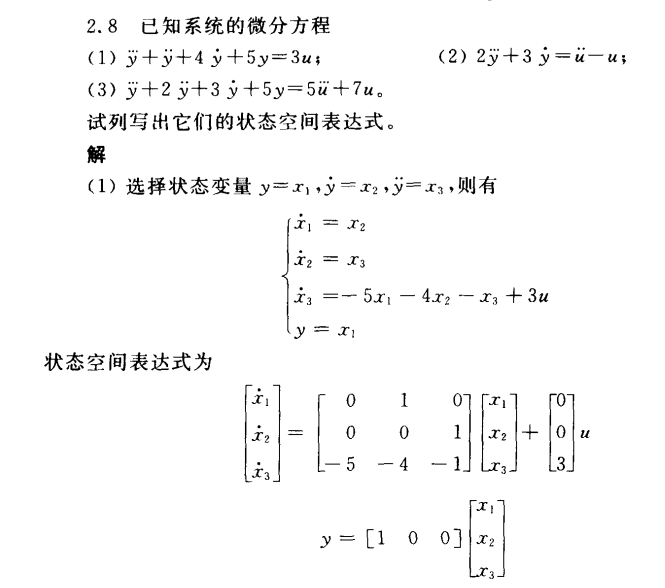
系统状态空间表达式要会写
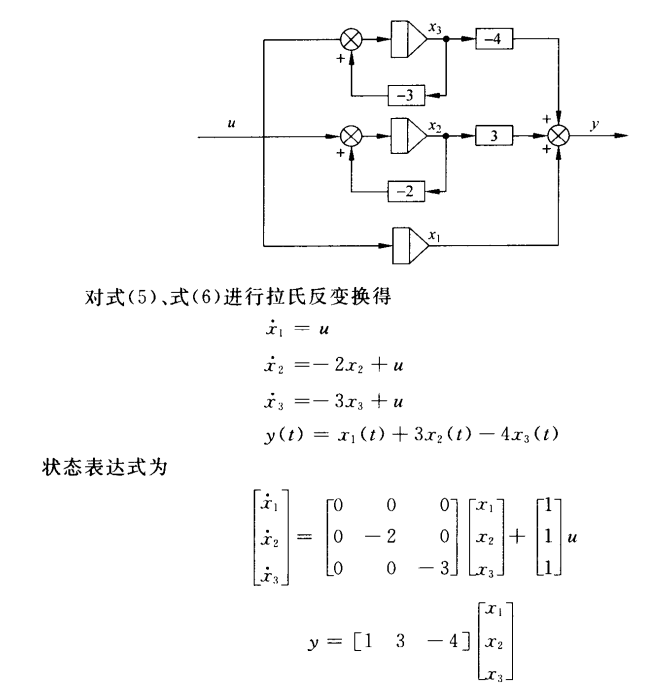
状态空间表达式的状态变量图
同一系统的各种模型间可以互相转化:重点,必考
- 常微分方程模型中不含输入函数的导数
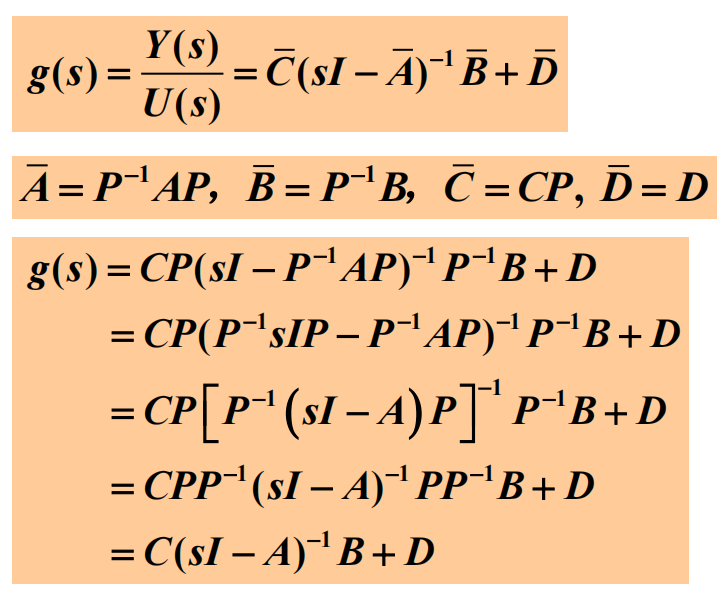
- 状态空间模型化为传递函数模型:
- 传递函数不变性证明:PPT第45页
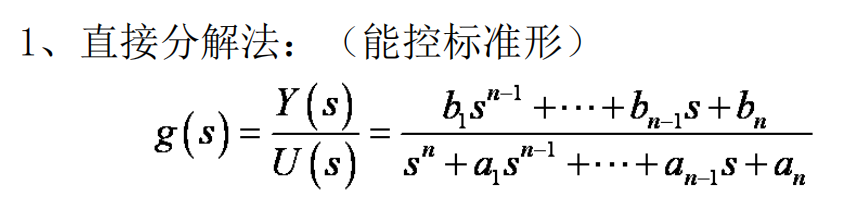
- 由传递函数建立状态空间表达式(求状态空间实现)——直接分解法、串联分解和并联分解。
-
直接分解法:
-
串联分解法:
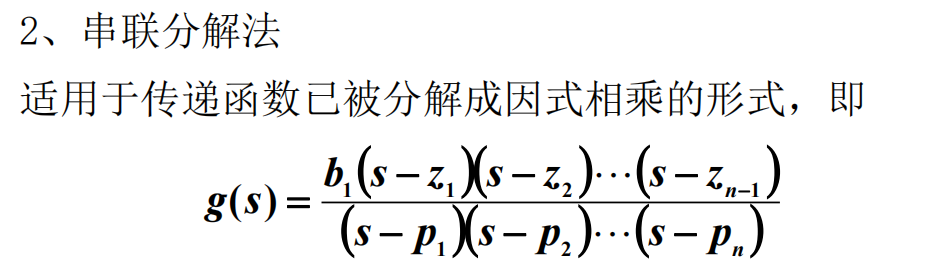
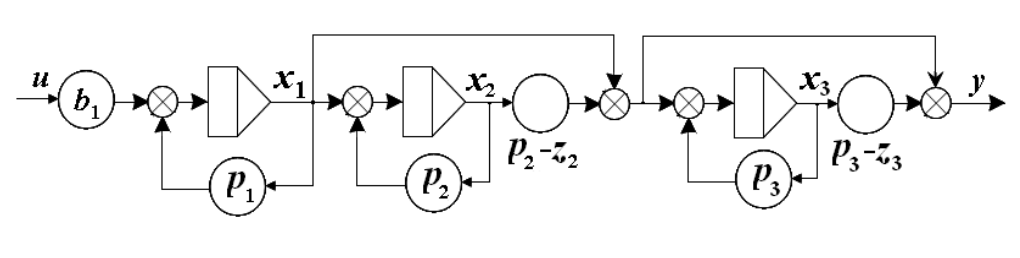
-
并联分解法:
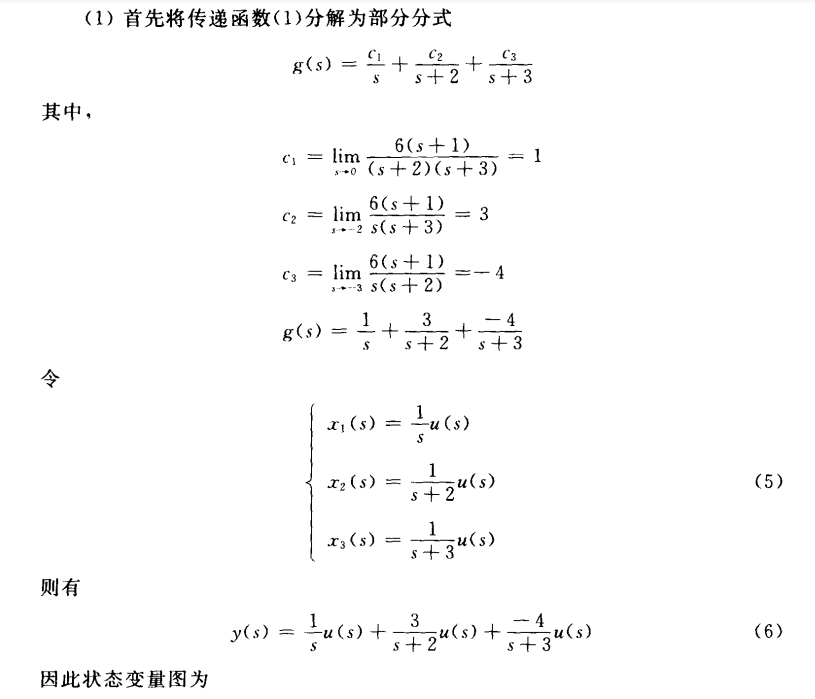
-
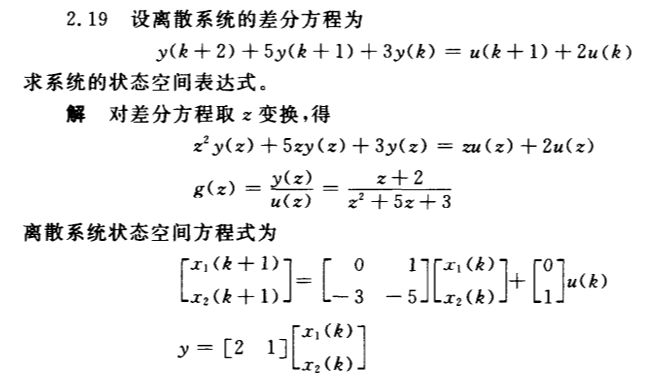
- 差分方程化为状态空间表达式:差分方程中不含输入函数的差分
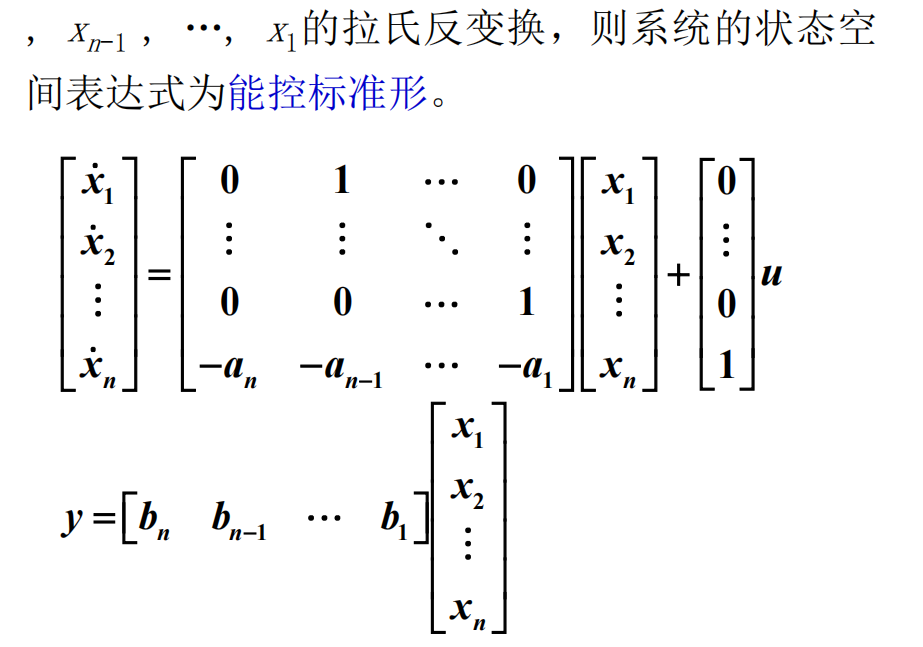
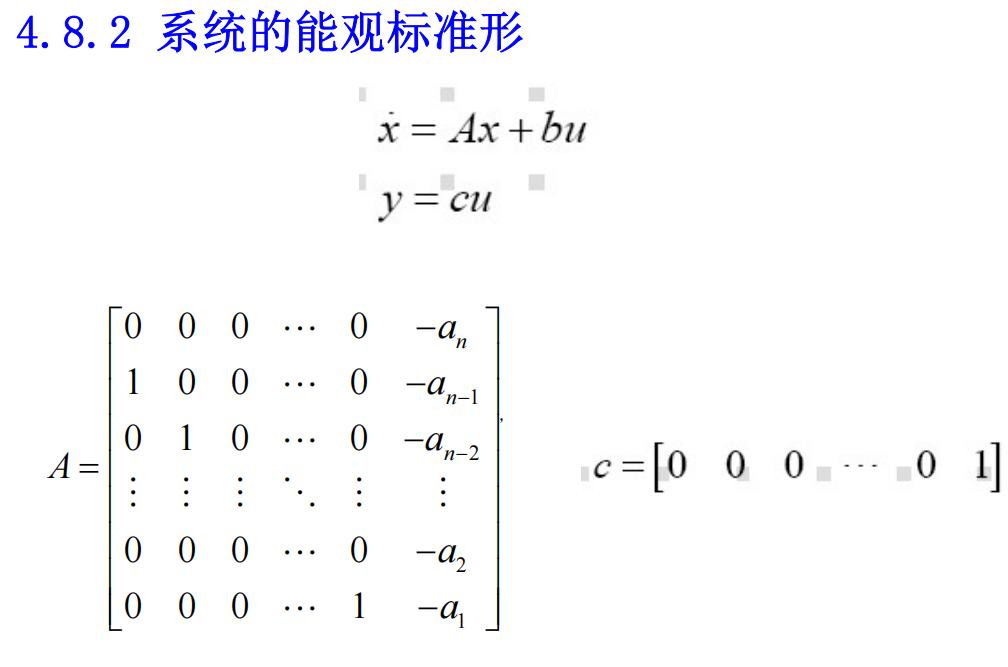
能观标准型和能控标准型要知道
第三章
线性时不变系统齐次状态方程的解:的解为。
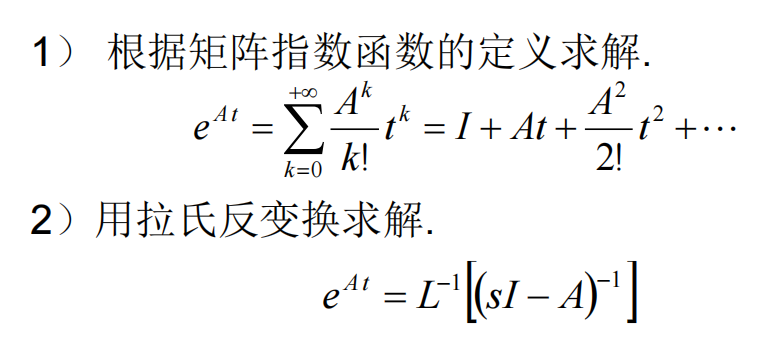
矩阵指数计算记住对角矩阵即可,矩阵指数函数要知道定义式与掌握拉式反变换方法
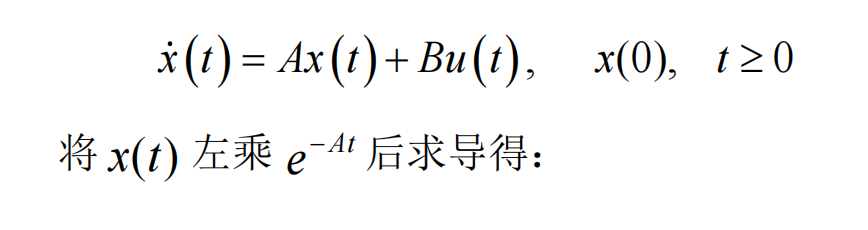
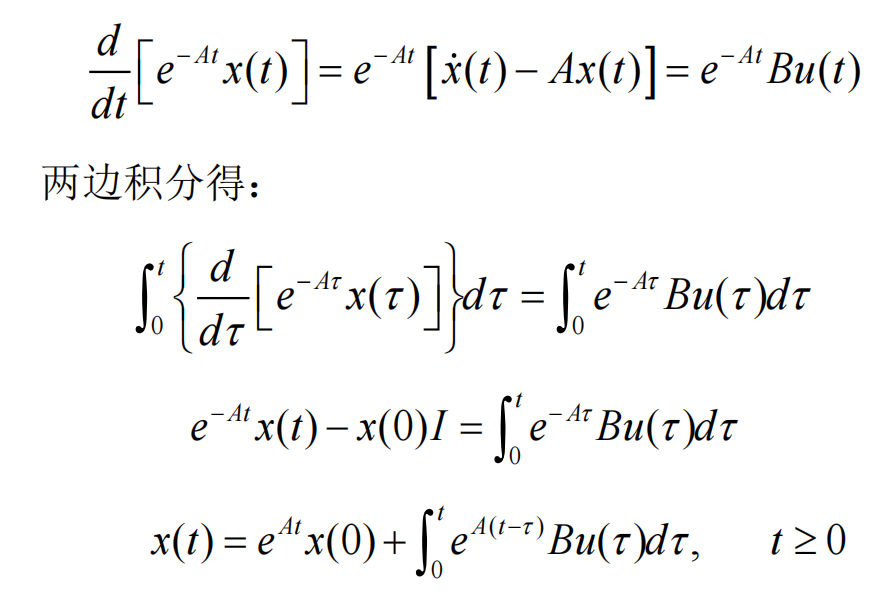
线性定常系统非齐次状态方程的解,PPT23页的推导:
线性时不变系统的状态转移矩阵
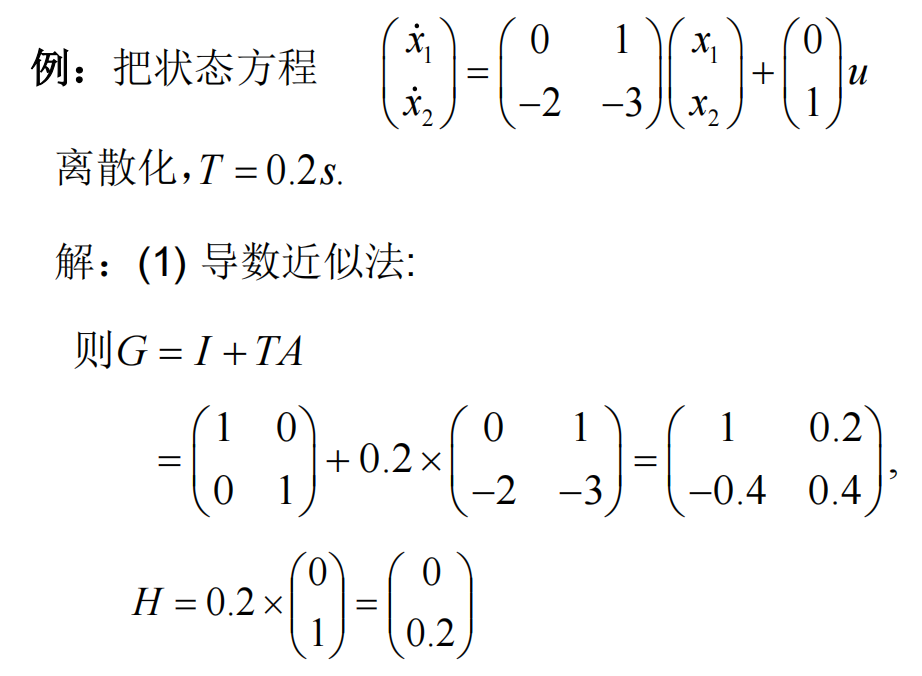
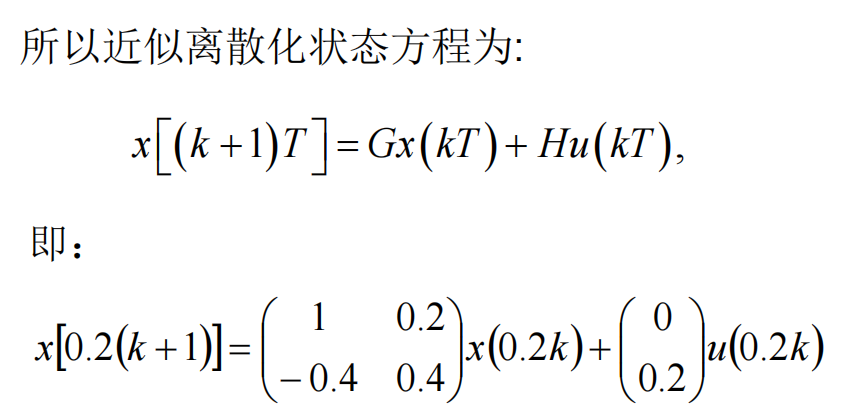
线性定常系统的离散化
-
导数近似法会套公式
-
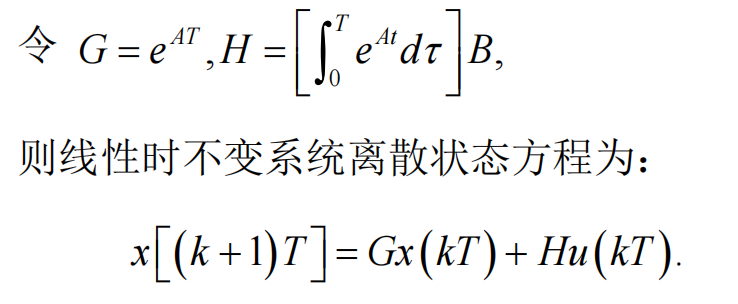
,零阶保持法的G和H要会推导,PPT31页,敲黑板
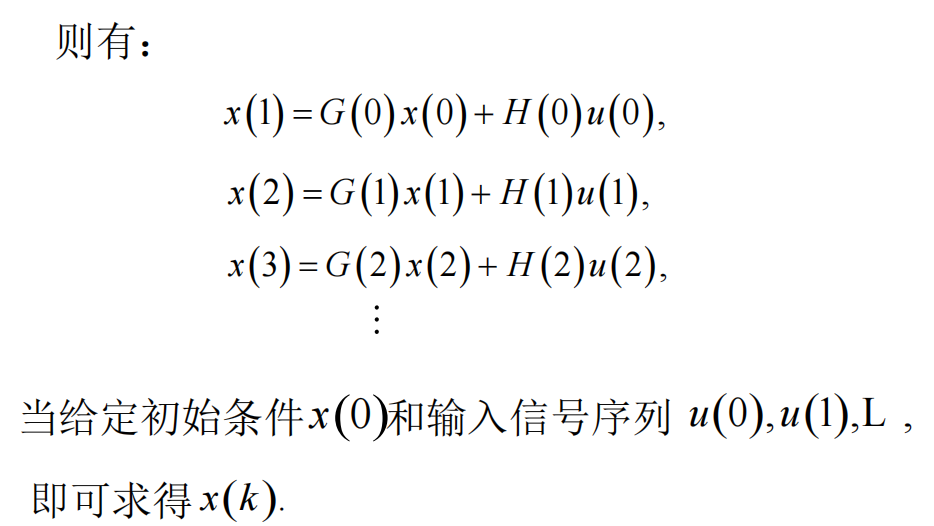
线性离散系统状态方程的解要会递推法
第四章
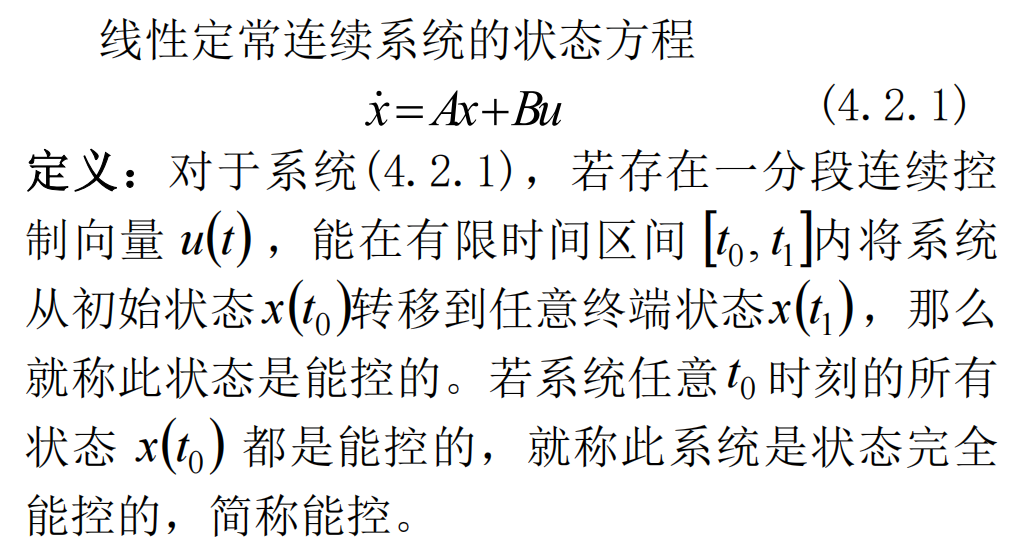
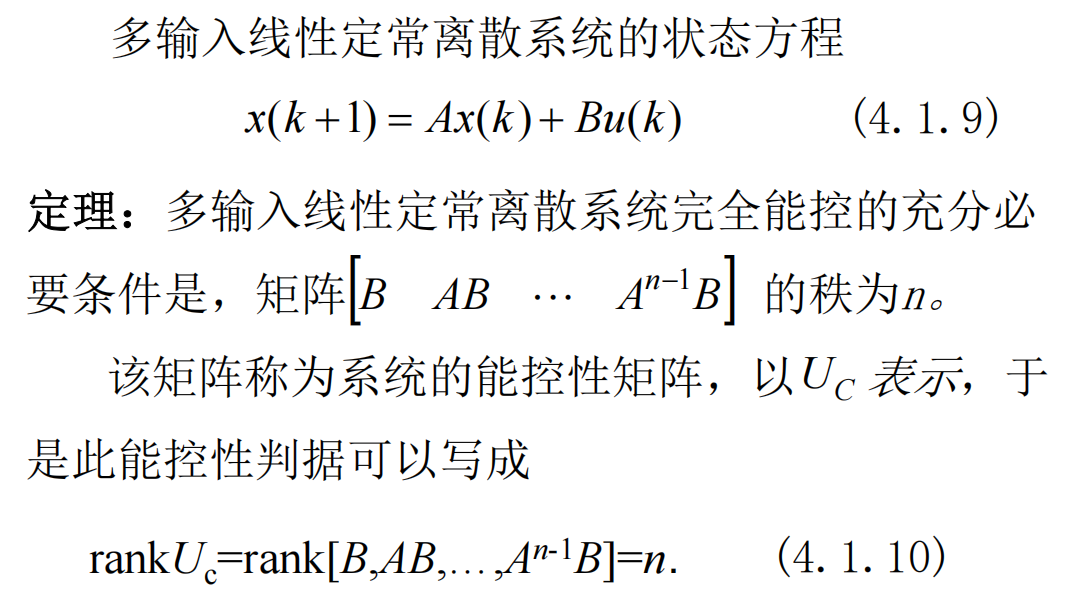
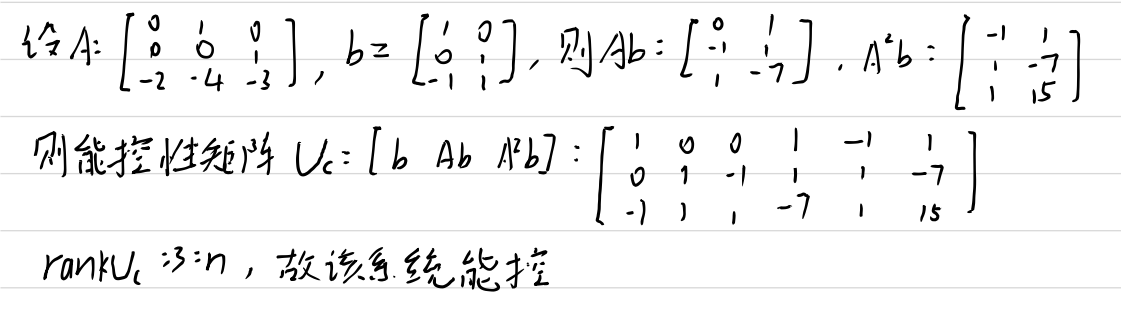
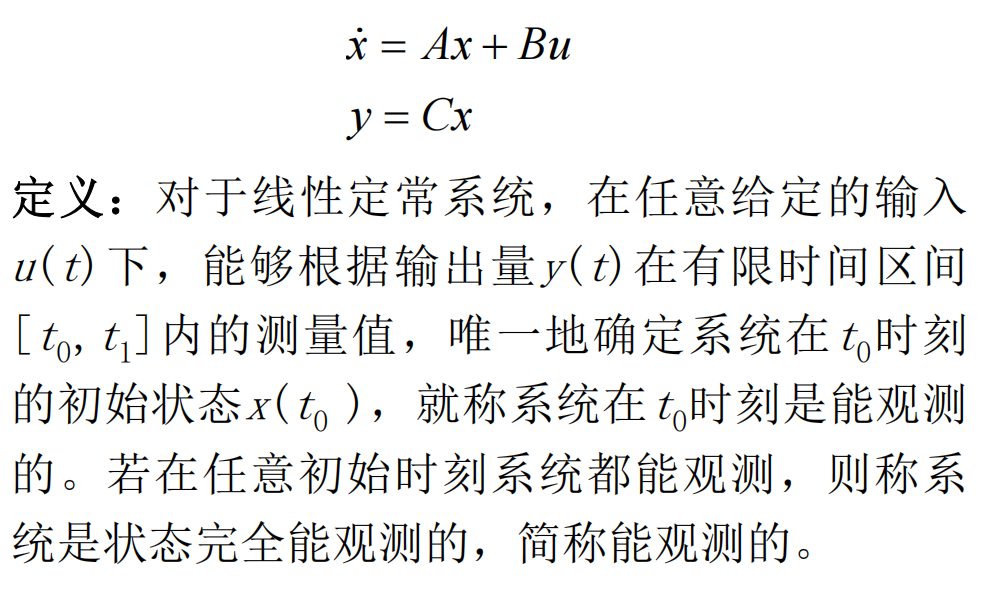
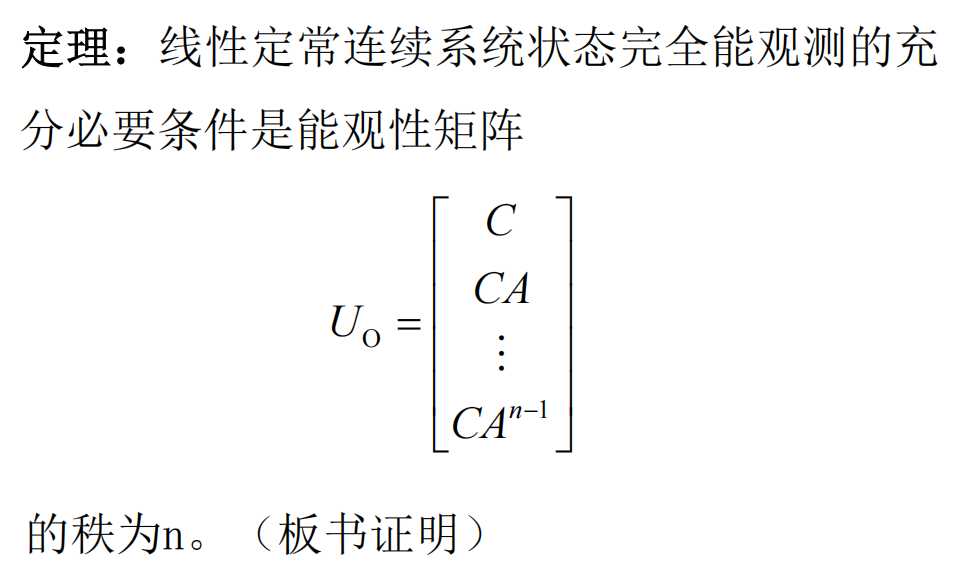
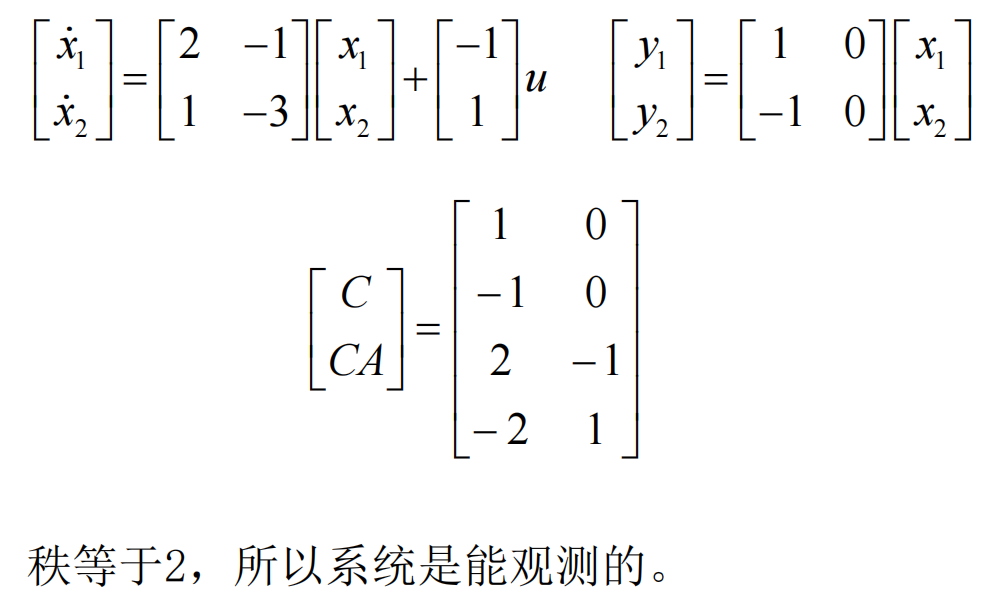
能控性和能观性的定义、能控性和能观性的判据
- 能控性:
- 能观性:
对偶关系
结构分解知道含义就行——采用系统坐标变换的方法对状态空间进行分解,将其划分成能控(能观)部分与不能控(不能观)部分。
能控性、能观性与传递函数矩阵的关系——系统能控能观的充要条件是传递函数g(s)中没有零极点对消现象(单输入单输出系统)
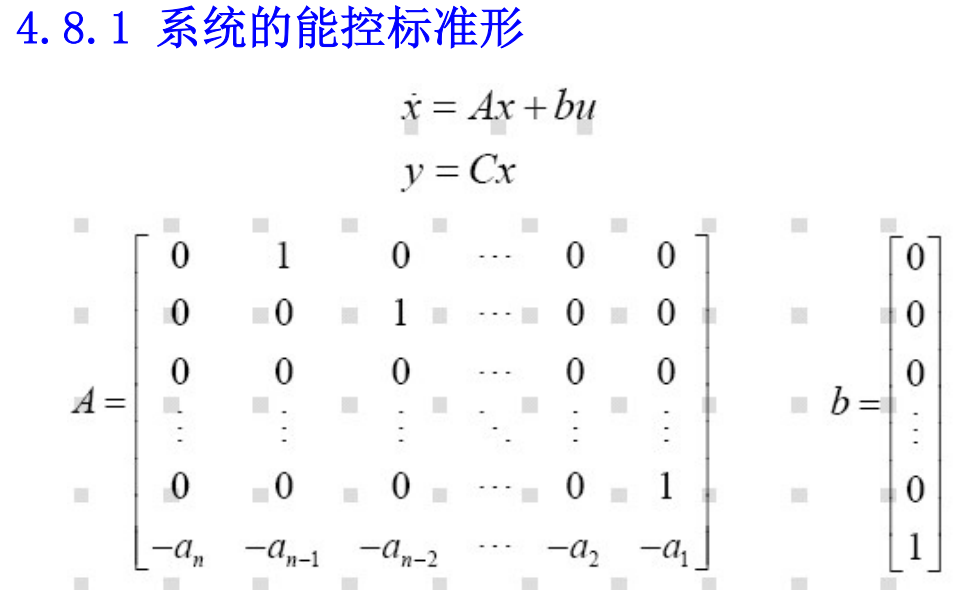
能控标准形和能观标准形知道形式,能化成标准型
系统的实现——把传递函数化为状态空间模型
最小实现——传递函数矩阵的最小实现和的充要条件是系统状态完全能控且完全能观测
第五章
平衡状态的含义

李雅普诺夫第一法和第二法
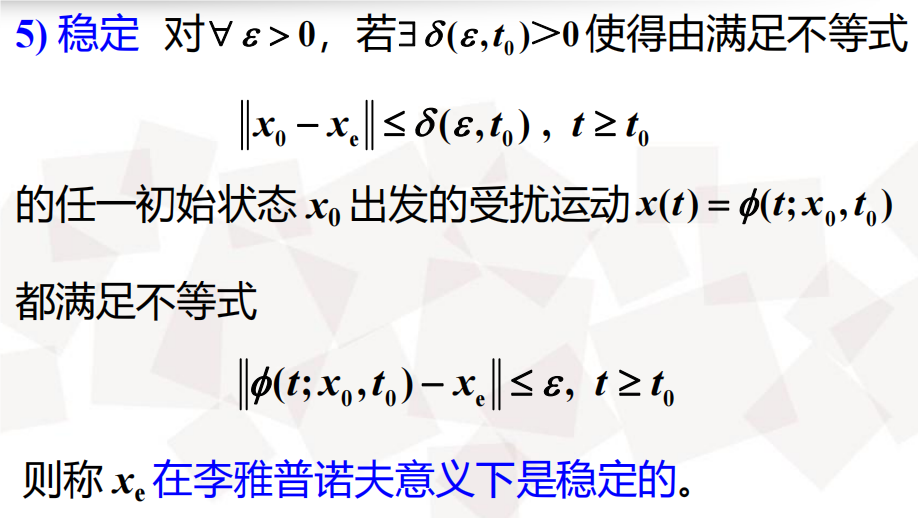
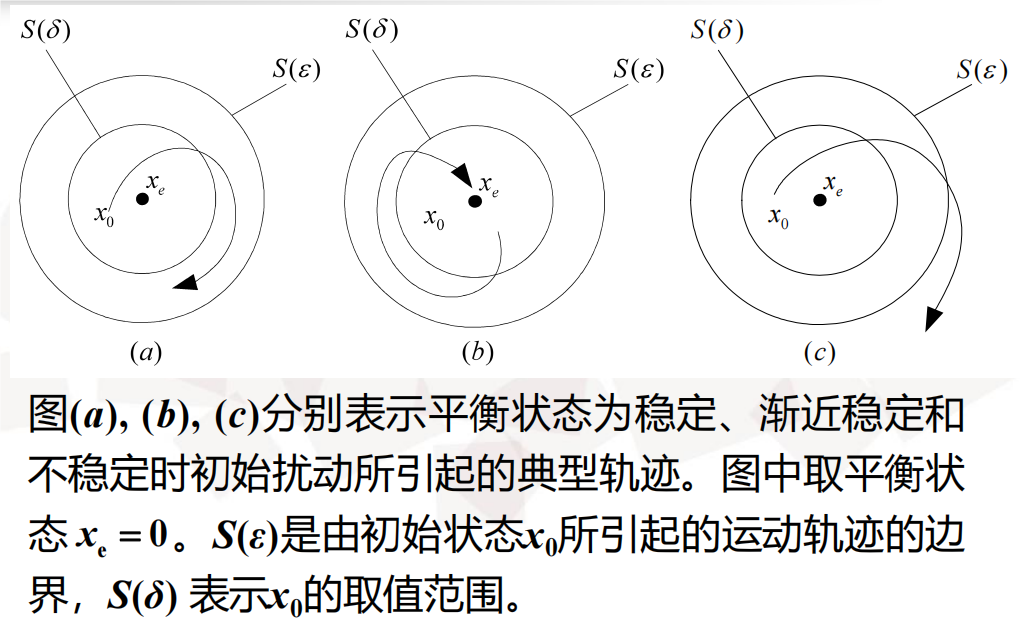
李雅普诺夫意义下的稳定,第7页PPT的图要会结合图来解释稳定、渐进稳定、不稳定
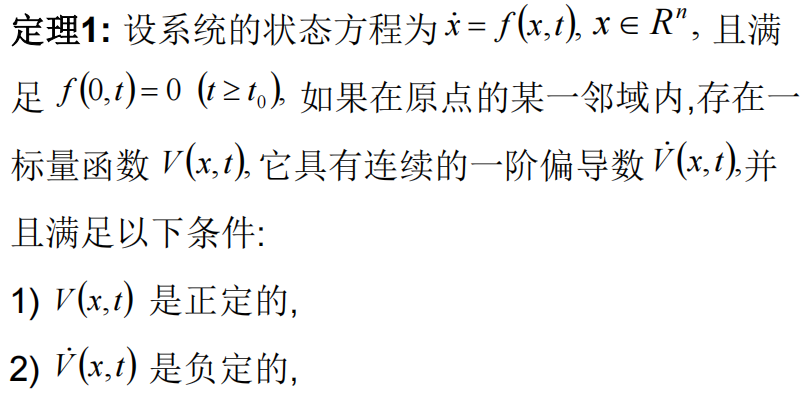
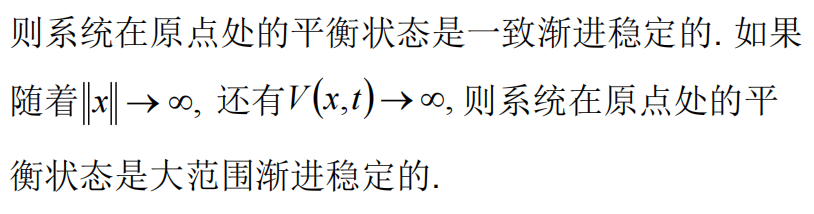
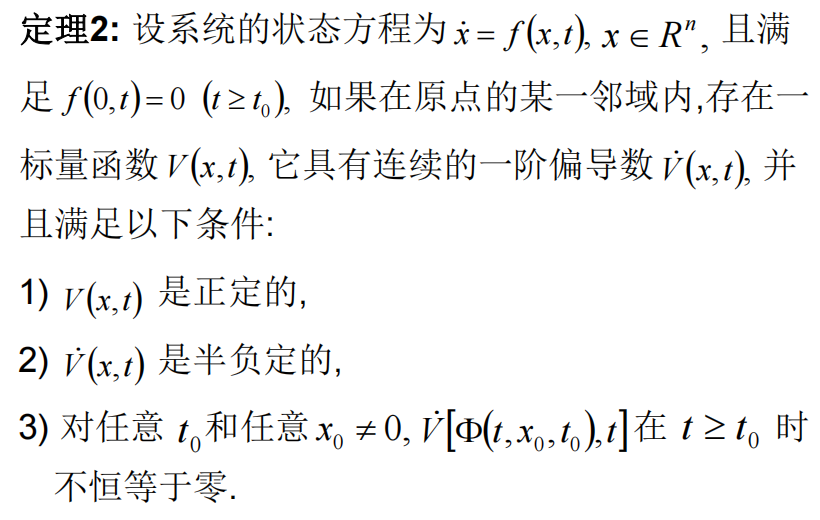
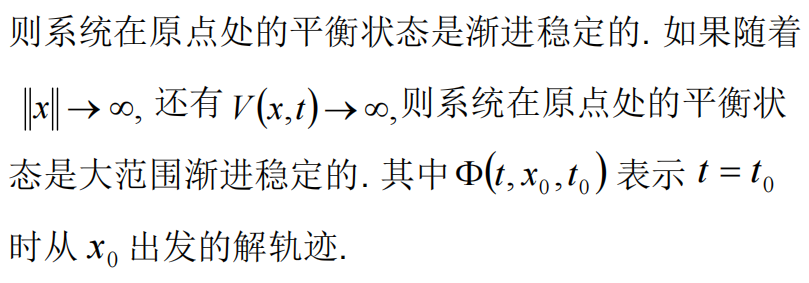
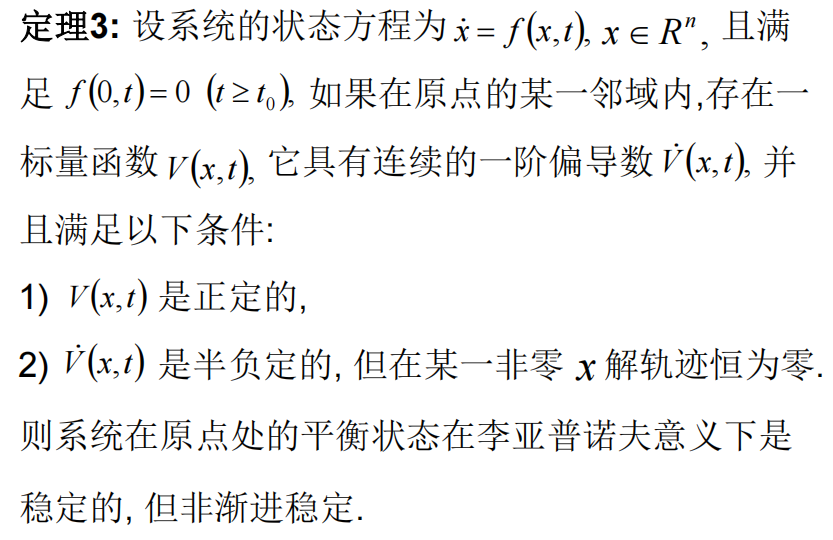
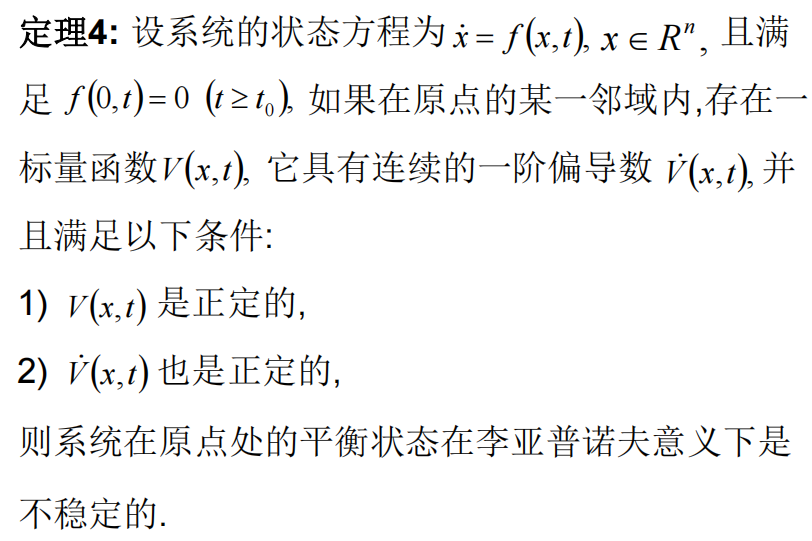
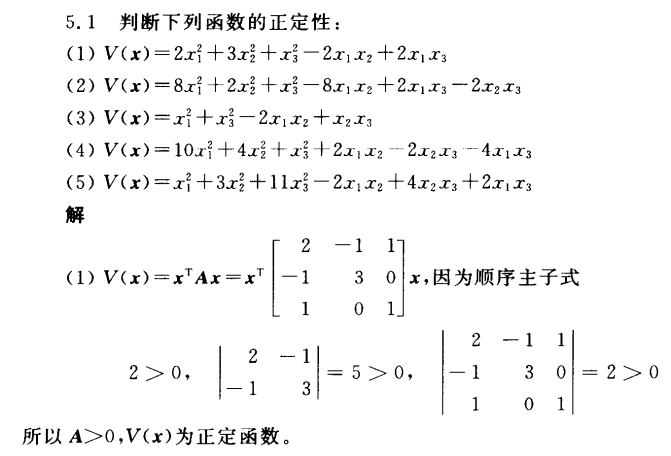
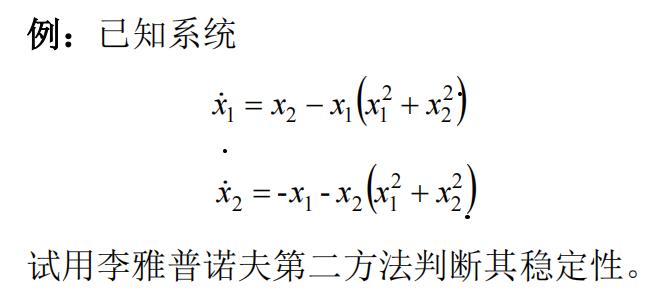
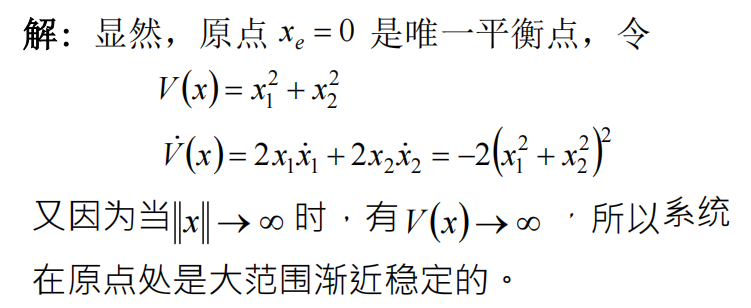
李雅普诺夫稳定性理论(也叫李亚普诺夫稳定性第二方法)的几个定理要会用来判断系统稳定性。
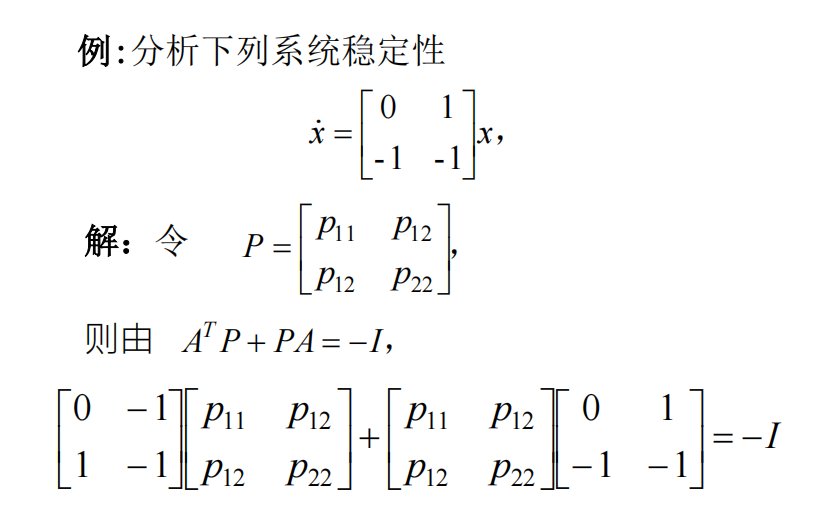
李亚普诺夫方法在线性系统中的应用:PPT24页
第六章
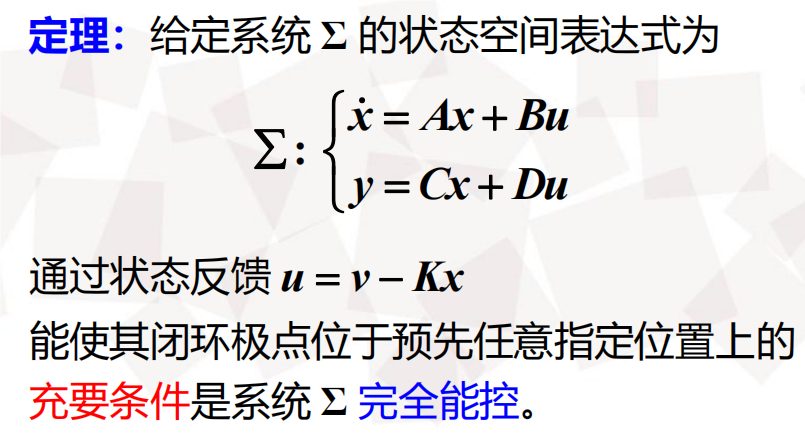
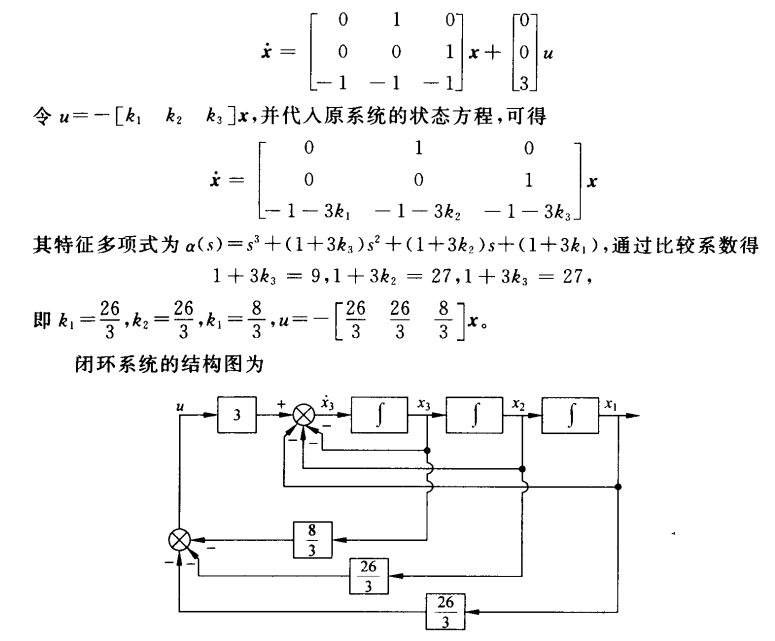
状态反馈的极点配置法
- 极点配置定理
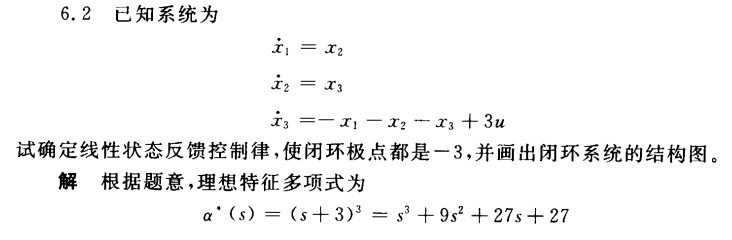
- 解题指导
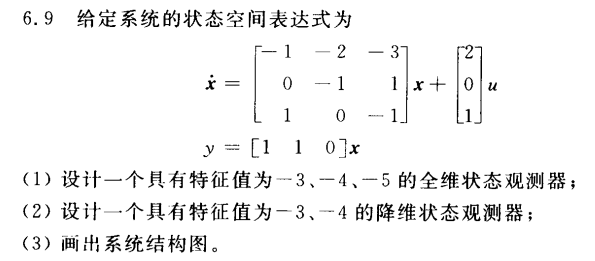
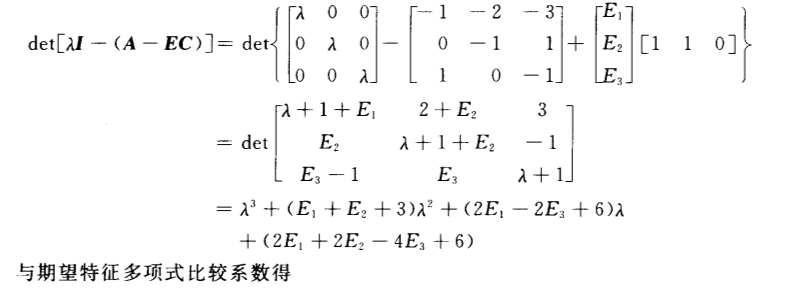
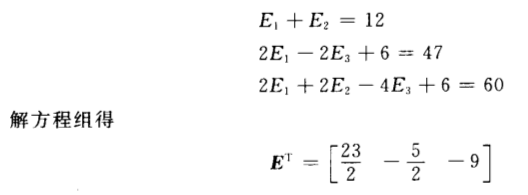
观测器的极点配置
- 线性定常系统的状态观测器存在的充要条件是: 其不能观测的部分是渐进稳定的
-
解题指导
-
降维状态观测器了解概念——当原n维系统的n个状态中有q个可直接量测或通过输出的线性变换可得到, 则只需为剩下的n-q个状态设计n-q维的状态观测器, 这样的状态观测器称为降阶观测器
分离原理要会解释:PPT48页
带有观测器的状态反馈闭环系统的状态空间模型要会写:PPT45页
本文作者:翎雨
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!